В начале изучения графовые алгоритмы могут показаться пугающими, но как только вы поймете фундаментальные алгоритмы обхода, шаблоны и потренируетесь в решении нескольких задач, они станут намного проще.
В этой статье мы рассмотрим 10 наиболее распространённых алгоритмов и шаблонов для работы с графами, которые встречаются на собеседованиях по программированию. Мы объясним, как они работают, когда их следует использовать, как их реализовать.
1. Поиск в глубину (DFS)
Поиск в глубину (DFS)
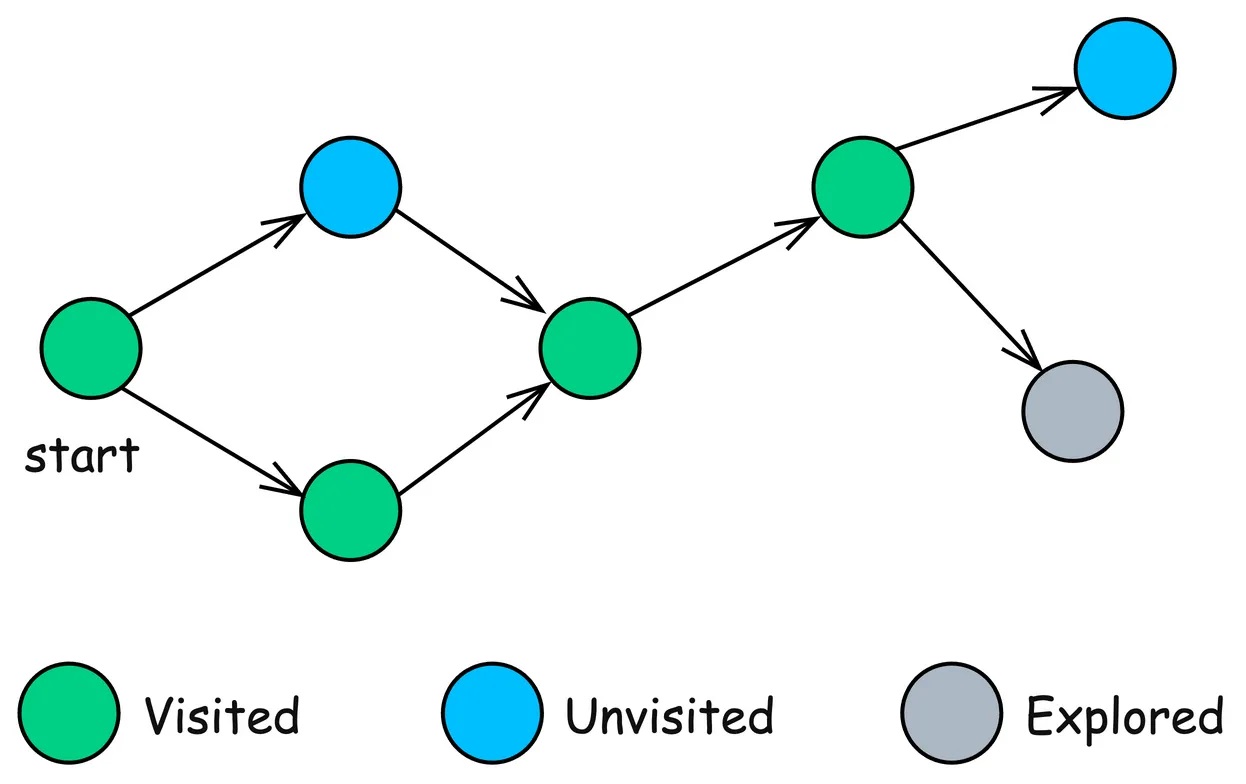
DFS — это фундаментальный алгоритм обхода графа, используемый для систематического изучения узлов и ребер графа.
Он начинается с заданного корневого узла и исследует как можно дальше вдоль каждой ветви, прежде чем вернуться назад.
DFS особенно полезен в таких сценариях, как:
- Найдите путь между двумя узлами.
- Проверка, содержит ли граф какие-либо циклы.
- Идентификация изолированных подграфов в более крупном графе.
- Топологическая сортировка: планирование задач без нарушения зависимостей.
Как работает DFS:
- Начните с корневого узла: Отметьте начальный узел как посещённый.
- Изучите соседние узлы: Для каждого соседнего узла выполните следующее:
- Если сосед не был посещён, выполните для него рекурсивную DFS.
- Возврат: после изучения всех путей от узла вернитесь к предыдущему узлу и продолжите процесс.
- Завершение: Алгоритм завершается, когда посещены все узлы, достижимые из начального узла.
Реализация:
Рекурсивная DFS: использует системную рекурсию (стек вызовов функций) для возврата к предыдущему состоянию.
def dfs_recursive(graph, node, visited=None):
if visited is None:
visited = set()
visited.add(node)
print(f"Посещение {node}")
for neighbor in graph[node]:
if neighbor not in visited:
dfs_recursive(graph, neighbor, visited)
return visited
Объяснение:
- Базовый вариант: Если
visitedне указан, инициализируйте его. - Посетите узел: добавьте текущий узел в набор
visited. - Рекурсивный вызов: для каждого непосещенного соседа выполните рекурсивный вызов
dfs_recursive.
Итеративная DFS: использует явный стек для имитации поведения при вызове функции.
def dfs_iterative(graph, start):
visited = set()
stack = [start]
while stack:
node = stack.pop()
if node not in visited:
visited.add(node)
print(f"Посещение {node}")
# Добавление соседей в стек
stack.extend([сосед за соседом в graph[node] если сосед не в гостях])
return visited
Объяснение:
- Инициализировать:
- A
visitedнабор для отслеживания посещенных узлов. - A
stackс начальным узлом.
- A
- Узлы процесса:
- Извлеките узел из стека.
- Если никто не посещен, отметьте как посещенный и добавьте его соседей в стек.
Временная сложность: O(V + E), где V — количество вершин, а E — количество рёбер. Это связано с тем, что алгоритм посещает каждую вершину и каждое ребро по одному разу.
Сложность по памяти: O(V), из-заиспользования стека для рекурсии (при рекурсивной реализации) или явного стека (при итеративной реализации).
2. Поиск по ширине (BFS)
Поиск по ширине (BFS)
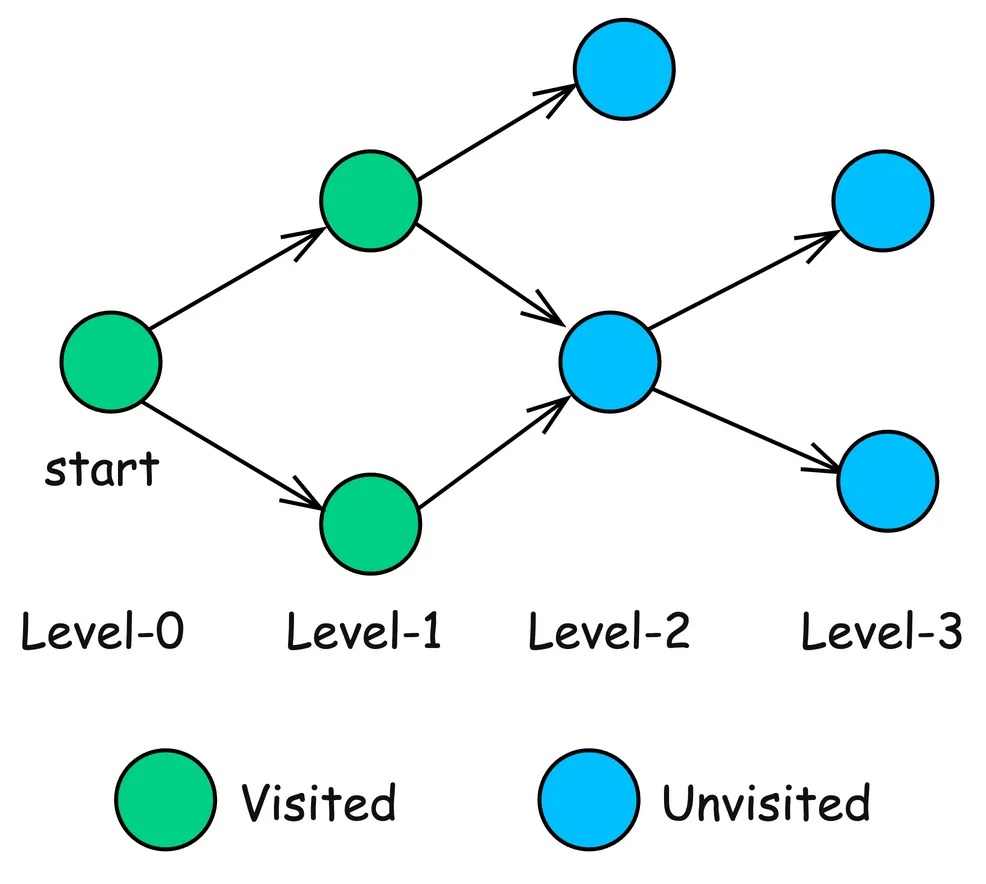
BFS — это фундаментальный алгоритм обхода графа, который систематически исследует вершины графа уровень за уровнем.
Начиная с выбранного узла, BFS сначала посещает все его непосредственные соседние узлы, а затем переходит к соседним узлам этих соседних узлов. Это гарантирует, что узлы будут исследованы в порядке их удалённости от начального узла.
BFS особенно полезен в таких сценариях, как:
- Нахождение минимального количества ребер между двумя узлами.
- Обработка узлов в иерархическом порядке, как в древовидных структурах данных.
- Поиск людей с определенной степенью связи в социальной сети.
Как работает BFS:
- Инициализация: создайте очередь и поместите в неё начальный узел.
- Отметьте начальный узел как посещенный.
- Цикл обхода: Пока очередь не пуста:
- Удаление узла из очереди в начале очереди.
- Посетите всех непрошеных соседей:
- Отметьте каждого соседа как посещенного.
- Поставьте соседа в очередь.
- Завершение: Алгоритм завершается, когда очередь пуста, то есть все достижимые узлы посещены.
Реализация:
from collections import deque
def bfs(graph, start):
visited = set()
queue = deque([start])
visited.add(start)
while queue:
vertex = queue.popleft()
print(f"Посещение {vertex}")
for neighbor in graph[vertex]:
if neighbor not in visited:
visited.add(neighbor)
queue.append(neighbor)
Временная сложность: O(V + E), где V — количество вершин, а E — количество рёбер. Это связано с тем, что BFS посещает каждую вершину и ребро ровно один раз.
Сложность по памяти: O(V)для очереди и набора посещённых элементов, используемых для обхода.
3. Топологическая сортировка
Топологическая сортировка
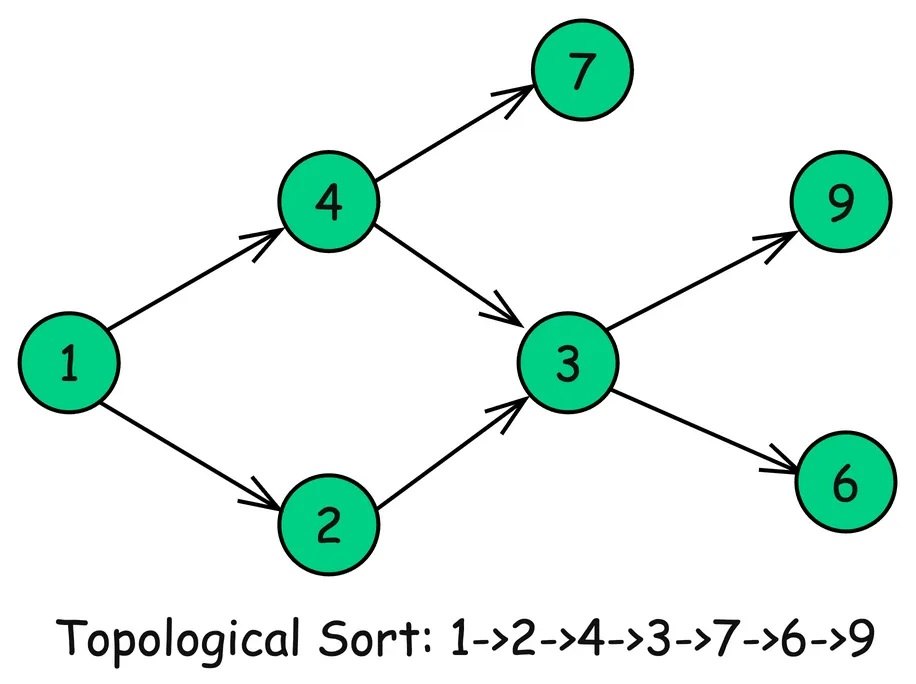
Алгоритм топологической сортировки используется для упорядочивания вершин ориентированного ациклического графа (DAG) в линейной последовательности таким образом, что для каждого направленного ребра u → v вершина u предшествует вершине v в порядке следования.
По сути, он упорядочивает узлы в последовательности, в которой все предварительные задачи предшествуют зависящим от них задачам.
Топологическая сортировка особенно полезна в таких сценариях, как:
- Определение порядка выполнения задач с учётом зависимостей (например, предварительных условий курса, систем сборки).
- Определение порядка установки программных пакетов, которые зависят друг от друга.
- Упорядочивание файлов или модулей таким образом, чтобы их можно было скомпилировать без ошибок из-за отсутствия зависимостей.
Существует два распространенных метода выполнения топологической сортировки:
1. Алгоритм, основанный на поиске в глубину (DFS):
def topological_sort_dfs(graph):
visited = set()
stack = []
def dfs(vertex):
visited.add(vertex)
for neighbor in graph.get(vertex, []):
if neighbor not in visited:
dfs(neighbor)
stack.append(vertex)
for vertex in graph:
if vertex not in visited:
dfs(vertex)
return stack[::-1] # Переверните стопку, чтобы получить правильный порядок
Объяснение:
- Обход по методу DFS: посещайте каждый узел и рекурсивно исследуйте его соседей.
- Вставка после обхода: после посещения всех потомков узла добавьте его в стек.
- Результат: Переверните стек, чтобы получить топологический порядок.
2. Топологическая сортировка на основе BFS (алгоритм Кана):
from collections import deque
def topological_sort_kahn(graph):
in_degree = {u: 0 for u in graph}
for u in graph:
for v in graph[u]:
in_degree[v] = in_degree.get(v, 0) + 1
queue = deque([u for u in in_degree if in_degree[u] == 0])
topo_order = []
while queue:
u = queue.popleft()
topo_order.append(u)
for v in graph.get(u, []):
in_degree[v] -= 1
if in_degree[v] == 0:
queue.append(v)
if len(topo_order) == len(in_degree):
return topo_order
else:
raise Exception("График имеет по крайней мере один цикл")
Объяснение:
- Вычислите степень вхождения: вычислите количество входящих рёбер для каждого узла.
- Инициализация очереди: начните с узлов, у которых нулевая степень вхождения.
- Узлы процесса:
- Удалите узел из очереди, добавьте его в топологический порядок.
- Уменьшают степень доступа к своим соседям.
- Ставьте в очередь соседей, степень которых равна нулю.
- Обнаружение цикла: если топологический порядок не включает все узлы, граф содержит цикл.
Временная сложность: O(V + E), поскольку каждый узел и ребро обрабатываются ровно один раз.
Сложность по пространству: O(V) для хранения топологического порядка и вспомогательных структур данных, таких как множество посещённых вершин или массив степеней.
4. Поиск объединения
Поиск объединения
Объединение в группу — это структура данных, которая отслеживает набор элементов, разделённых на непересекающиеся (не имеющие общих элементов) подмножества.
Он поддерживает две основные операции:
- Поиск (Find-Set): Определяет, к какому подмножеству относится конкретный элемент. Это можно использовать для проверки, находятся ли два элемента в одном подмножестве.
- Объединение: объединяет два подмножества в одно, фактически соединяя два элемента.
Поиск обьединения особенно полезен в таких сценариях, как:
- Быстрая проверка, создает ли добавление ребра цикл в графике.
- Построение минимального остовного дерева путем соединения наименьших ребер без образования циклов.
- Определение того, находятся ли два узла в одном и том же подключенном компоненте.
- Группировка похожих элементов вместе.
Как работает Union Find:
Структура данных Union Find обычно состоит из:
- Родительский массив (
parent): Массив, в которомparent[i]хранится родительский элементi. Изначально каждый элемент является своим собственным родителем. - Массив рангов (
rank): Массив, который приблизительно соответствует глубине (или высоте) дерева, представляющего каждый набор. Используется для оптимизации объединений.
Операции:
- Найти(x):
- Находит репрезентативный (корневой) набор, содержащий
x. - Следует родительским указателям до тех пор, пока не достигнет узла, который является его собственным родительским узлом.
- Сжатие пути используется для оптимизации временной сложности операции поиска за счёт того, что каждый узел на пути указывает непосредственно на корень, упрощая структуру.
- Находит репрезентативный (корневой) набор, содержащий
- Объединение (x, y):
- Объединяет наборы, содержащие
xиy. - Найдите корни
xиy, затем сделайте один корень родительским для другого. - Объединение по рангу используется для оптимизации, при которой корень меньшего дерева становится дочерним по отношению к корню большего дерева, чтобы дерево оставалось неглубоким.
- Объединяет наборы, содержащие
Реализация:
class UnionFind:
def __init__(self, size):
self.parent = [i for i in range(size)] # Изначально каждый узел является своим собственным родительским узлом
self.rank = [0] * size # Ранг (глубина) каждого дерева
def find(self, x):
if self.parent[x] != x:
# Сжатие контура: сглаживание дерева
self.parent[x] = self.find(self.parent[x])
return self.parent[x]
def union(self, x, y):
# Найдите корни множеств, содержащих x и y
root_x = self.find(x)
root_y = self.find(y)
if root_x == root_y:
# Уже в том же наборе
return
# Объединение по рангу: прикрепите меньшее дерево к корню большего дерева
if self.rank[root_x] < self.rank[root_y]:
self.parent[root_x] = root_y
elif self.rank[root_y] < self.rank[root_x]:
self.parent[root_y] = root_x
else:
# Ранги равны; выберите один из них в качестве нового корня и увеличьте его ранг
self.parent[root_y] = root_x
self.rank[root_x] += 1
Временная сложность каждой операции:
- Поиск и объединение: амортизированная O(α(n)), где α(n) — обратная функция Аккермана, которая практически постоянна.
- Временная сложность: O(n), где
n— количество элементов для храненияparentиrankмассивов.
5. Обнаружение циклов
Обнаружение циклов
Обнаружение циклов заключается в определении того, содержит ли граф циклы — пути, в которых первая и последняя вершины совпадают, а рёбра не повторяются.
Другими словами, это последовательность вершин, начинающаяся и заканчивающаяся одной и той же вершиной, при этом каждая смежная пара соединена ребром.
Обнаружение цикла особенно важно в таких сценариях, как:
- Обнаружение заблокированных процессов в операционных системах для выявления циклических условий ожидания.
- Обеспечение отсутствия циклических зависимостей в системах управления пакетами или системах сборки.
- Понимание того, является ли граф деревом или циклическим графом.
Существуют различные подходы к обнаружению циклов в графах:
Обнаружение циклов в неориентированных графах с использованием DFS:
def has_cycle_undirected(graph):
visited = set()
def dfs(vertex, parent):
visited.add(vertex)
for neighbor in graph.get(vertex, []):
if neighbor not in visited:
if dfs(neighbor, vertex):
return True
elif neighbor != parent:
return True # Обнаружен цикл
return False
for vertex in graph:
if vertex not in visited:
if dfs(vertex, None):
return True
return False
Объяснение:
- Обход DFS: запускайте DFS с непросмотренных узлов.
- Отслеживание родительского узла: отслеживайте родительский узел, чтобы избежать ложных срабатываний.
- Условие обнаружения цикла: если посещенный сосед не является родителем, то обнаруживается цикл.
Обнаружение циклов в ориентированных графах с использованием DFS:
def has_cycle_directed(graph):
visited = set()
recursion_stack = set()
def dfs(vertex):
visited.add(vertex)
recursion_stack.add(vertex)
for neighbor in graph.get(vertex, []):
if neighbor not in visited:
if dfs(neighbor):
return True
elif neighbor in recursion_stack:
return True # Обнаружен цикл
recursion_stack.remove(vertex)
return False
for vertex in graph:
if vertex not in visited:
if dfs(vertex):
return True
return False
Объяснение:
- Набор посещений и стек рекурсии:
visitedотслеживает все посещенные узлы.recursion_stackотслеживает узлы на текущем пути.
- Условие обнаружения цикла:
- Если сосед находится в стеке рекурсии, обнаруживается цикл.
Обнаружение цикла с помощью Union-Find (неориентированные графы):
class UnionFind:
def __init__(self):
self.parent = {}
def find(self, x):
# Сжатие пути
if self.parent.get(x, x) != x:
self.parent[x] = self.find(self.parent[x])
return self.parent.get(x, x)
def union(self, x, y):
root_x = self.find(x)
root_y = self.find(y)
if root_x == root_y:
return False # Обнаружен цикл
self.parent[root_y] = root_x
return True
def has_cycle_union_find(edges):
uf = UnionFind()
for u, v in edges:
if not uf.union(u, v):
return True
return False
Объяснение:
- Инициализация: Создайте экземпляр UnionFind.
- Обработка ребер:
- Для каждого ребра попытайтесь объединить вершины.
- Если
unionвозвращаетсяFalse, обнаруживается цикл.
Временная сложность: O(V + E), так как каждый узел и ребро обрабатываются не более одного раза.
Сложность по памяти: O(V) для набора посещенных вершин и стека рекурсии в DFS.
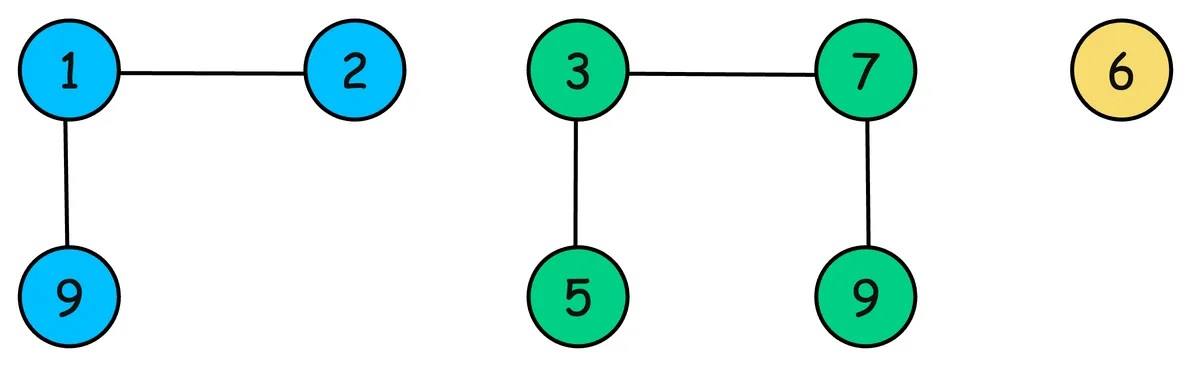
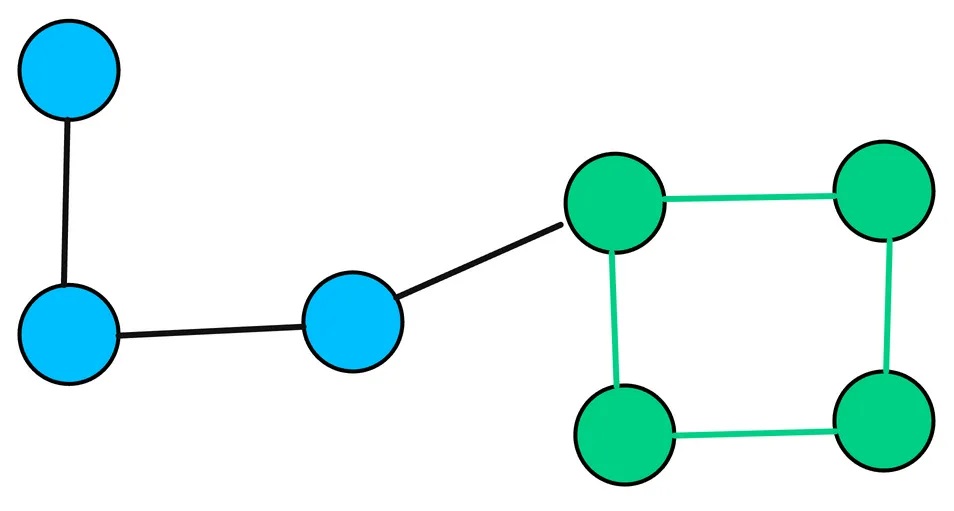
6. Связанные компоненты
В контексте неориентированных графов связный компонент — это набор вершин, в котором каждая вершина соединена по крайней мере с одной другой вершиной из того же набора с помощью некоторого пути.
По сути, это максимальная группа узлов, в которой каждый узел доступен из любого другого узла той же группы.
В ориентированных графах мы имеем дело с сильно связными компонентами (ССК), в которых существует ориентированный путь от каждой вершины к любой другой вершине в пределах одного компонента.
Как найти связанные компоненты:
Мы можем найти связные компоненты с помощью алгоритмов обхода графа, таких как поиск в глубину (DFS) или поиск в ширину (BFS).
Идея состоит в том, чтобы:
- Инициализировать:
- Создайте набор
visitedдля отслеживания посещенных узлов. - Инициализируйте список
componentsдля хранения каждого подключенного компонента.
- Создайте набор
- Обход:
- Для каждого непросмотренного узла выполните DFS или BFS.
- Отметьте все доступные узлы из этого узла как часть одного и того же компонента.
- Добавьте компонент в список
components.
- Повторение:
- Продолжайте процесс до тех пор, пока не будут посещены все узлы.
Реализация:
def connected_components(graph):
visited = set()
components = []
def dfs(node, component):
visited.add(node)
component.append(node)
for neighbor in graph.get(node, []):
if neighbor not in visited:
dfs(neighbor, component)
for node in graph:
if node not in visited:
component = []
dfs(node, component)
components.append(component)
return components
Объяснение:
- Посещаемый набор: отслеживает посещенные узлы, чтобы предотвратить повторный переход.
- Функция DFS:
- Рекурсивно исследует всех соседей узла.
- Добавляет каждый посещенный узел к текущему
component.
- Основной цикл:
- Выполняет итерации по всем узлам графика.
- Для непросмотренных узлов инициирует DFS и собирает подключенный компонент.
Временная сложность: O(V + E), поскольку каждый узел и ребро посещаются ровно один раз.
Сложность по памяти: O(V) из-за набора visited и стека рекурсии (в DFS) или очереди (в BFS).
Сильно связанные компоненты в ориентированных графах:
Чтобы найти сильно связные компоненты в ориентированном графе, вы можете использовать такие алгоритмы, как алгоритм Косараджу или алгоритм Тарджана.
Шаги алгоритма Косараджу:
- Первый проход: Выполните DFS на исходном графе, чтобы вычислить время завершения работы каждого узла.
- Транспонировать граф: изменить направление всех ребер на обратное.
- Второй проход: Выполните DFS на транспонированном графе в порядке убывания времени завершения первого прохода.
- Результат: каждый обход DFS во втором проходе идентифицирует сильно связанный компонент.
7. Двудольные графы
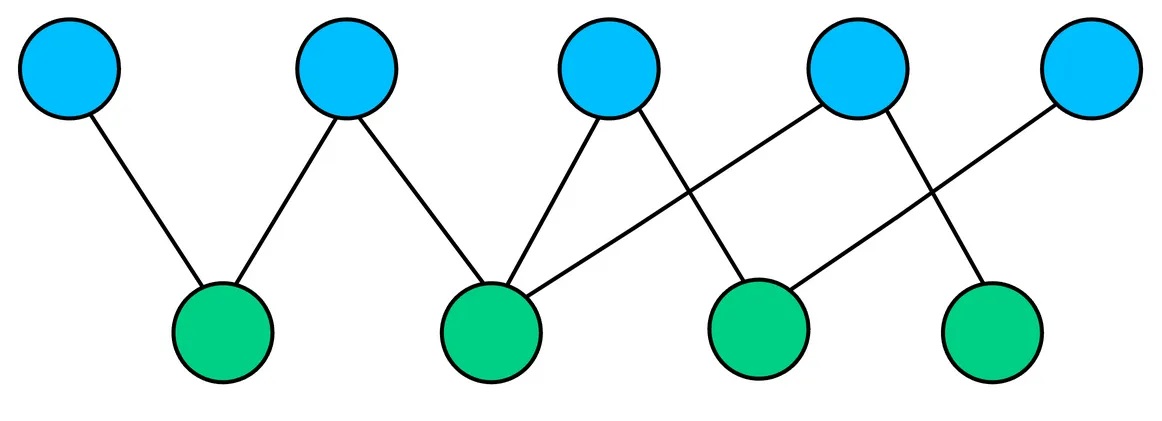
Двудольные графы
Двудольный граф — это тип графа, вершины которого могут быть разделены на два непересекающихся и независимых множества, обычно обозначаемых как U и V, так что каждое ребро соединяет вершину из U с вершиной из V.
Другими словами, никакое ребро не соединяет вершины в пределах одного набора.
Представьте себе две группы людей на вечеринке: одну группу интервьюеров, а другую — кандидатов. Вершины представляют собой интервью между интервьюером и кандидатом. Поскольку ни один интервьюер не берёт интервью у другого интервьюера, а ни один кандидат не берёт интервью у другого кандидата, граф естественным образом делится на два множества, становясь двудольным.
Свойства двудольных графов:
- Двудольный граф: граф является двудольным тогда и только тогда, когда его можно раскрасить двумя цветами так, чтобы никакие две смежные вершины не были одного цвета.
- Нет циклов нечётной длины: двудольные графы не содержат циклов нечётной длины.
Как проверить, является ли граф двудольным:
Мы можем определить, является ли граф двудольным, попытавшись раскрасить его двумя цветами, не присваивая один и тот же цвет смежным вершинам. Если это удалось, то граф является двудольным.
Это можно сделать с помощью:
- Поиск в ширину (BFS): назначайте цвета уровень за уровнем.
- Поиск в глубину (DFS): Рекурсивно назначайте цвета.
Реализация с использованием BFS
from collections import deque
def is_bipartite(graph):
color = {}
for node in graph:
if node not in color:
queue = deque([node])
color[node] = 0 # Назначьте первый цвет
while queue:
current = queue.popleft()
for neighbor in graph[current]:
if neighbor not in color:
color[neighbor] = 1 - color[current] # Назначьте противоположный цвет
queue.append(neighbor)
elif color[neighbor] == color[current]:
return False # Соседние узлы имеют одинаковый цвет
return True
Объяснение:
- Инициализация: создайте словарь
colorдля хранения цвета, присвоенного каждому узлу. - Обход BFS: Для каждого неокрашенного узла запустите BFS.
- Назначьте начальному узлу цвет (0 или 1).
- Для каждого соседа:
- Если они не окрашены, присвоите им противоположный цвет и поставьте в очередь.
- Если он уже окрашен и имеет тот же цвет, что и текущий узел, то граф не является двудольным.
- Результат: Если обход завершается без конфликтов, граф является двудольным.
Временная сложность: O(V + E), поскольку каждый узел и ребро посещаются ровно один раз.
Сложность по памяти: O(V) из-за набора color и стека рекурсии (в DFS) или очереди (в BFS).
8. Заливка флудом
Заливка — это алгоритм, который определяет и изменяет область, связанную с заданным узлом в многомерном массиве.
Начиная с начальной точки, он находит или заполняет (или перекрашивает) все связанные пиксели или ячейки с одинаковым цветом или значением.
Как работает заливка флудом:
- Начальная точка: начните с начального пикселя (начальных координат).
- Проверьте цвет: если цвет текущего пикселя совпадает с целевым цветом (который нужно заменить), продолжайте.
- Замените цвет: измените цвет текущего пикселя на новый.
- Рекурсивный визит к соседям:
- Перейдите к соседним пикселям (вверх, вниз, влево, вправо или по диагонали, в зависимости от реализации).
- Повторите процесс для каждого соседа, который соответствует целевому цвету.
- Завершение: Алгоритм завершается, когда все связанные пиксели целевого цвета обработаны.
Реализация
Рекурсивное заполнение потоком:
def flood_fill_recursive(image, sr, sc, new_color):
rows, cols = len(image), len(image[0])
color_to_replace = image[sr][sc]
if color_to_replace == new_color:
return image
def dfs(r, c):
if (0 <= r < rows and 0 <= c < cols and image[r][c] == color_to_replace):
image[r][c] = new_color
# Исследуйте соседей: up, down, left, right
dfs(r + 1, c) # Вниз
dfs(r - 1, c) # Вверх
dfs(r, c + 1) # Влево
dfs(r, c - 1) # Вправо
dfs(sr, sc)
return image
Объяснение:
- Базовый случай: Если заменяемый цвет совпадает с новым цветом, верните изображение без изменений.
- Функция DFS:
- Проверяет границы и соответствует ли текущий пиксель цвету, который нужно заменить.
- Изменяет цвет текущего пикселя.
- Рекурсивно вызывает себя на соседних пикселях.
Итеративное заполнение потоком:
from collections import deque
def flood_fill_iterative(image, sr, sc, new_color):
rows, cols = len(image), len(image[0])
color_to_replace = image[sr][sc]
if color_to_replace == new_color:
return image
queue = deque()
queue.append((sr, sc))
image[sr][sc] = new_color
while queue:
r, c = queue.popleft()
for dr, dc in [(-1, 0), (1, 0), (0, -1), (0, 1)]: # Направления: up, down, left, right
nr, nc = r + dr, c + dc
if (0 <= nr < rows and 0 <= nc < cols and image[nr][nc] == color_to_replace):
image[nr][nc] = new_color
queue.append((nr, nc))
return image
Объяснение:
- Инициализация:
- Используйте a
dequeв качестве очереди для управления пикселями для обработки. - Начните с постановки в очередь начального пикселя.
- Используйте a
- Цикл обработки:
- Удаление пикселя из очереди.
- Для каждого направления (вверх, вниз, влево, вправо) проверьте, нужно ли заполнить соседнюю ячейку.
- Если да, измените его цвет и поставьте в очередь.
- Завершение:
- Цикл заканчивается, когда больше не остается пикселей для обработки.
Временная сложность: O(N), где N — количество пикселей в области, которую нужно заполнить. Каждый пиксель посещается не более одного раза.
Пространственная сложность:
- Рекурсивная реализация: O(N) из-за стека вызовов в рекурсии.
- Итеративная реализация: O(N), если для управления пикселями используется очередь или стек.
9. Минимальное связующее дерево
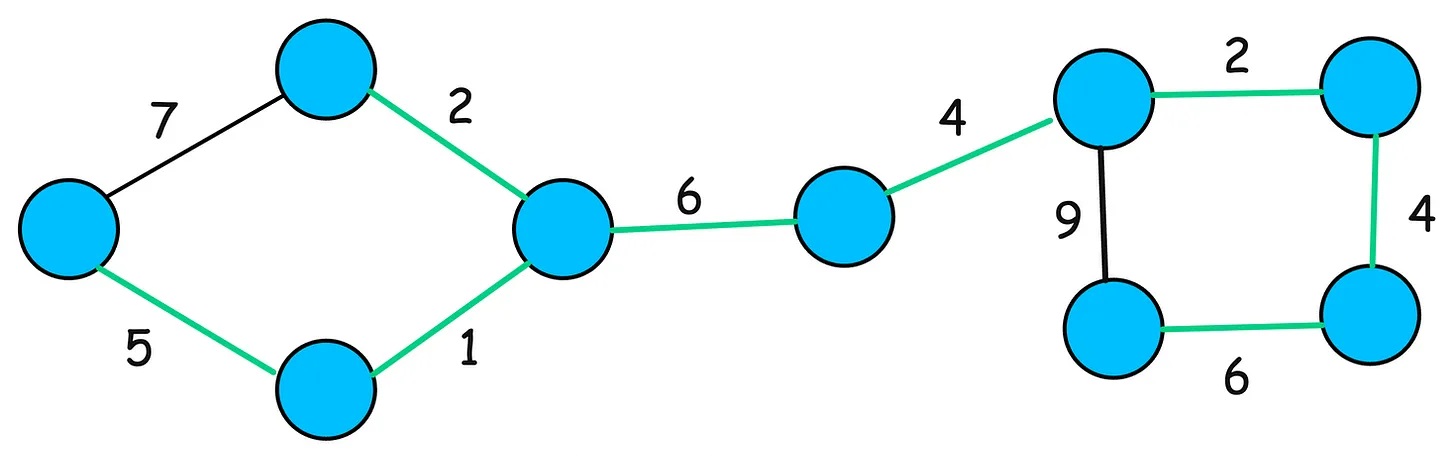
Минимальное связующее дерево (MST)
MST — это подмножество ребер связного, неориентированного, взвешенного графа, который соединяет все вершины вместе без каких-либо циклов и с минимально возможным общим весом ребер.
Проще говоря, это самый дешёвый способ соединить все узлы в сети без каких-либо петель.
Ключевые алгоритмы поиска MST:
1. Алгоритм Крускала:
- Построение MST путём последовательного добавления рёбер, начиная с самых маленьких.
- Использует структуру данных Union Find для обнаружения циклов.
Реализация:
class UnionFind:
def __init__(self, size):
self.parent = [i for i in range(size)]
self.rank = [0] * size
def find(self, x):
if self.parent[x] != x:
# Сжатие пути
self.parent[x] = self.find(self.parent[x])
return self.parent[x]
def union(self, x, y):
root_x = self.find(x)
root_y = self.find(y)
if root_x == root_y:
return False # Обнаружен цикл
# Объединение по рангу
if self.rank[root_x] < self.rank[root_y]:
self.parent[root_x] = root_y
elif self.rank[root_y] < self.rank[root_x]:
self.parent[root_y] = root_x
else:
self.parent[root_y] = root_x
self.rank[root_x] += 1
return True
def kruskal_mst(num_nodes, edges):
# edges - это список кортежей: (weight, node_u, node_v)
uf = UnionFind(num_nodes)
mst = []
total_weight = 0
# Сортировка ребер по весу
edges.sort(key=lambda x: x[0])
for weight, u, v in edges:
if uf.union(u, v):
mst.append((u, v, weight))
total_weight += weight
print(f"Edge добавлен: ({u}, {v}) with weight {weight}")
else:
print(f"Edge ({u}, {v}) с весом {weight} создает цикл и пропускается.")
print(f"Общий вес MST: {total_weight}")
return mst
Объяснение:
- Класс UnionFind:
- Управляет непересекающимися наборами для эффективного обнаружения циклов.
- Сортировка по краям:
- Ребра сортируются по весу, чтобы в первую очередь учитывать наименьшие ребра.
- Основной цикл:
- Выполняет итерацию по отсортированным ребрам.
- Пытается объединить множества, содержащие вершины ребра.
- Если объединение выполнено успешно, ребро добавляется к MST.
- Если это приведет к созданию цикла, ребро пропускается.
Временная сложность: O(E log E), так как сортировка рёбер занимает O(E log E), а операции объединения и поиска выполняются практически за постоянное время
Сложность по пространству: O(V + E), O(V) для хранения массивов родительских вершин и рангов в алгоритме объединения и O(E) для хранения рёбер.
2. Алгоритм Прима:
- Начинает с произвольного узла и наращивает MST, добавляя самый дешёвый путь из дерева к новой вершине.
import heapq
def prim_mst(graph, start=0):
num_nodes = len(graph)
visited = [False] * num_nodes
min_heap = [(0, start, -1)] # (weight, current_node, parent_node)
mst = []
total_weight = 0
while min_heap and len(mst) < num_nodes - 1:
weight, u, parent = heapq.heappop(min_heap)
if not visited[u]:
visited[u] = True
if parent != -1:
mst.append((parent, u, weight))
total_weight += weight
print(f"Edge добавлен: ({parent}, {u}) with weight {weight}")
for v, w in graph[u]:
if not visited[v]:
heapq.heappush(min_heap, (w, v, u))
if len(mst) != num_nodes - 1:
print("График не подключен.")
return None
print(f"Общий вес MST: {total_weight}")
return mst
Объяснение:
- Инициализация:
visitedмассив отслеживает посещенные узлы.min_heapявляется приоритетной очередью, инициализированной начальным узлом.
- Основной цикл:
- Пока куча не пуста, а MST неполон:
- Выделите ребро с минимальным весом.
- Если узел не был посещен:
- Отметьте его как посещенное.
- Добавьте ребро в MST (если это не начальный узел).
- Добавьте все ребра из этого узла в кучу.
- Пока куча не пуста, а MST неполон:
- Завершение:
- Алгоритм завершается, когда все узлы включены в MST.
- Проверяет, охватывает ли MST все узлы (граф связан).
Временная сложность: O(E log V) при использовании очереди с приоритетом (минимальная куча).
Сложность по памяти: O(V) для очереди с приоритетом и используемых массивов.
10. Кратчайший путь
Кратчайший путь
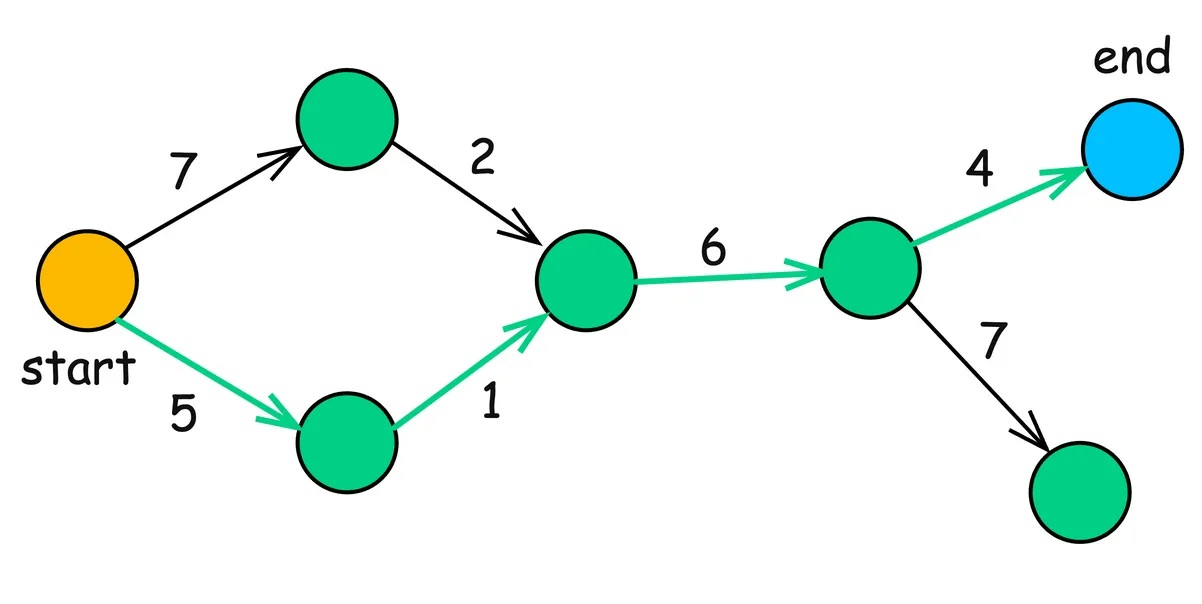
Задача о кратчайшем пути заключается в поиске пути между двумя вершинами (узлами) графа, сумма весов составляющих его рёбер которого минимальна.
Проще говоря, речь идёт о поиске наиболее эффективного маршрута от начальной точки к конечному пункту назначения в сети.
Ключевые алгоритмы поиска кратчайших путей:
1. Алгоритм Дейкстры:
- Находит кратчайшие пути от одной исходной вершины ко всем остальным вершинам в графе с неотрицательными весами рёбер.
- Это жадный алгоритм, использующий очередь с приоритетами (минимальную кучу).
import heapq
def dijkstra(graph, start):
# график: список смежностей, где graph[u] = [(v, weight), ...]
distances = {vertex: float('inf') для вершины в графе}
distances[start] = 0
priority_queue = [(0, start)]
while priority_queue:
current_distance, current_vertex = heapq.heappop(priority_queue)
# Пропустите, если мы уже нашли лучший путь
if current_distance > distances[current_vertex]:
continue
for neighbor, weight in graph[current_vertex]:
distance = current_distance + weight
# Если найден более короткий путь к соседу
if distance < distances[neighbor]:
distances[neighbor] = distance
heapq.heappush(priority_queue, (distance, neighbor))
return distances
Объяснение:
- Инициализация:
distancesсловарь хранит кратчайшее известное расстояние до каждой вершины.priority_queueэто минимальная куча, хранящая кортежи(distance, vertex).
- Основной цикл:
- Выберите вершину с наименьшим известным расстоянием.
- Для каждого соседа вычислите новое расстояние.
- Если новое расстояние короче, обновите и перенесите в кучу.
- Результат:
- Возвращает кратчайшее расстояние от начальной вершины до всех остальных вершин.
Временная сложность: O(V + E log V) при использовании минимальной кучи (очереди с приоритетом).
Сложность по пространству: O(V) для хранения расстояний и очереди с приоритетом.
2. Алгоритм Беллмана-Форда:
- Вычисляет кратчайшие пути от одной исходной вершины ко всем остальным вершинам, даже если в графе есть отрицательные веса рёбер.
- Он может обнаруживать негативные циклы.
def bellman_ford(graph, start):
# график: список ребер [(u, v, weight), ...]
num_vertices = len({u для ребра в графе для u в edge[:2]})
distances = {vertex: float('inf') для ребра в графе, для вершины в edge[:2]}
distances[start] = 0
# Несколько раз расслабьте края
for _ in range(num_vertices - 1):
for u, v, weight in graph:
if distances[u] + weight < distances[v]:
distances[v] = distances[u] + weight
# Проверьте наличие циклов с отрицательным весом
for u, v, weight in graph:
if distances[u] + weight < distances[v]:
raise Exception("График содержит цикл с отрицательным весом")
return distances
Объяснение:
- Инициализация:
distancesв словаре хранится кратчайшее известное расстояние до каждой вершины. - Основной цикл: Повторяйте
num_vertices - 1раз, расслабляя все мышцы. - Проверка отрицательного цикла: окончательный проход для проверки улучшений указывает на отрицательный цикл.
- Результат: возвращает кратчайшие расстояния от начальной вершины до всех остальных вершин.
Временная сложность: O (V * E)
Сложность пространства: O (V) для хранения расстояний.
3. Поиск по ширине (BFS):
- Применимо для невзвешенных графов или графов, в которых все рёбра имеют одинаковый вес.
- Находит кратчайший путь, исследуя соседние узлы уровень за уровнем.
from collections import deque
def bfs_shortest_path(graph, start, target):
visited = set()
queue = deque([(start, [start])]) # Each element is a tuple (node, path_to_node)
visited.add(start)
while queue:
current_node, path = queue.popleft()
if current_node == target:
return path # Найден кратчайший путь
for neighbor in graph[current_node]:
if neighbor not in visited:
visited.add(neighbor)
queue.append((neighbor, path + [neighbor]))
return None # Путь не найден
4. Алгоритм A * (A-Star):
- Используется для графиков, где у вас есть эвристическая оценка расстояния до цели.
- Обычно используется для поиска пути и обхода графов, особенно в играх и приложениях с искусственным интеллектом.
Как это работает:
- A* сочетает в себе функции алгоритма Дейкстры и жадного поиска в первую очередь.
- Он выбирает путь, который сводит к минимуму
f(n) = g(n) + h(n), где:g(n)это фактическая стоимость перехода от начального узла к текущему узлуn.h(n)— эвристическая оценочная стоимость отnдо цели.
Реализация:
import heapq
def a_star(graph, start, goal, heuristic):
open_set = []
heapq.heappush(open_set, (0 + heuristic(start, goal), 0, start, [start])) # (f_score, g_score, node, path)
closed_set = set()
while open_set:
f_score, g_score, current_node, path = heapq.heappop(open_set)
if current_node == goal:
return path # Найден кратчайший путь
if current_node in closed_set:
continue
closed_set.add(current_node)
for neighbor, weight in graph[current_node]:
if neighbor in closed_set:
continue
tentative_g_score = g_score + weight
tentative_f_score = tentative_g_score + heuristic(neighbor, goal)
heapq.heappush(open_set, (tentative_f_score, tentative_g_score, neighbor, path + [neighbor]))
return None # Путь не найден
Временная сложность:
- В худшем случае: O(b^d), где b — коэффициент ветвления (среднее количество потомков в каждом состоянии), а d — глубина решения.
- В лучшем случае: O(d), когда эвристическая функция идеальна и ведёт непосредственно к цели.
Сложность по памяти: O(b^d), так как необходимо хранить все сгенерированные узлы в памяти.
5. Алгоритм Флойда-Уорсхолла:
- Вычисляет кратчайший путь между всеми парами вершин.
- Подходит для плотных графов с меньшим числом вершин.
- Алгоритм итеративно обновляет кратчайшие пути между всеми парами вершин, рассматривая все возможные промежуточные вершины.
Реализация:
def floyd_warshall(graph):
# Инициализируйте матрицы distance и next_node
nodes = list(graph.keys())
dist = {u: {v: float('inf') for v in nodes} for u in nodes}
next_node = {u: {v: None for v in nodes} for u in nodes}
# Инициализируйте расстояния на основе прямых ребер
for u in nodes:
dist[u][u] = 0
for v, weight in graph[u]:
dist[u][v] = weight
next_node[u][v] = v
# Алгоритм Флойда-Уоршалла
for k in nodes:
for i in nodes:
for j in nodes:
if dist[i][k] + dist[k][j] < dist[i][j]:
dist[i][j] = dist[i][k] + dist[k][j]
next_node[i][j] = next_node[i][k]
# Проверьте наличие отрицательных циклов
for u in nodes:
if dist[u][u] < 0:
raise Exception("График содержит цикл с отрицательным весом")
return dist, next_node
Временная сложность: O (V ^ 3)
Сложность по памяти: O(V^2) для хранения массива расстояний.
Надеюсь, вам понравилось читать эту статью.
Если вы нашли эту статью полезной, поставьте лайк ❤️.
Если у вас есть какие-либо вопросы или предложения, оставьте комментарий.